We chose the idea of a Bluetooth controlled car because it sounded fun and achievable and now we’re hashing through the details. At first we thought we would use Lego Technic pieces (the ones with all the gears and rods) but they look pretty expensive and it’s hard to know what parts would work without having them in front of you to play around with. I’ve seen a room in HFH where people are working with them so maybe we might still use them if we can play with them with our own hands and see how well they would fit our purposes.
While it would be really cool to construct all the machinery of a car in miniature (turning mechanism, front mounted motor with driveshaft going down the length of the chassis) we’re not mechanical engineers. The chassis kits we found online that had turning mechanisms marketed towards RC enthusiasts looked really cool were too expensive. We’re being graded on our ability to control peripherals, not construct RC cars, so we looked for cheaper options.

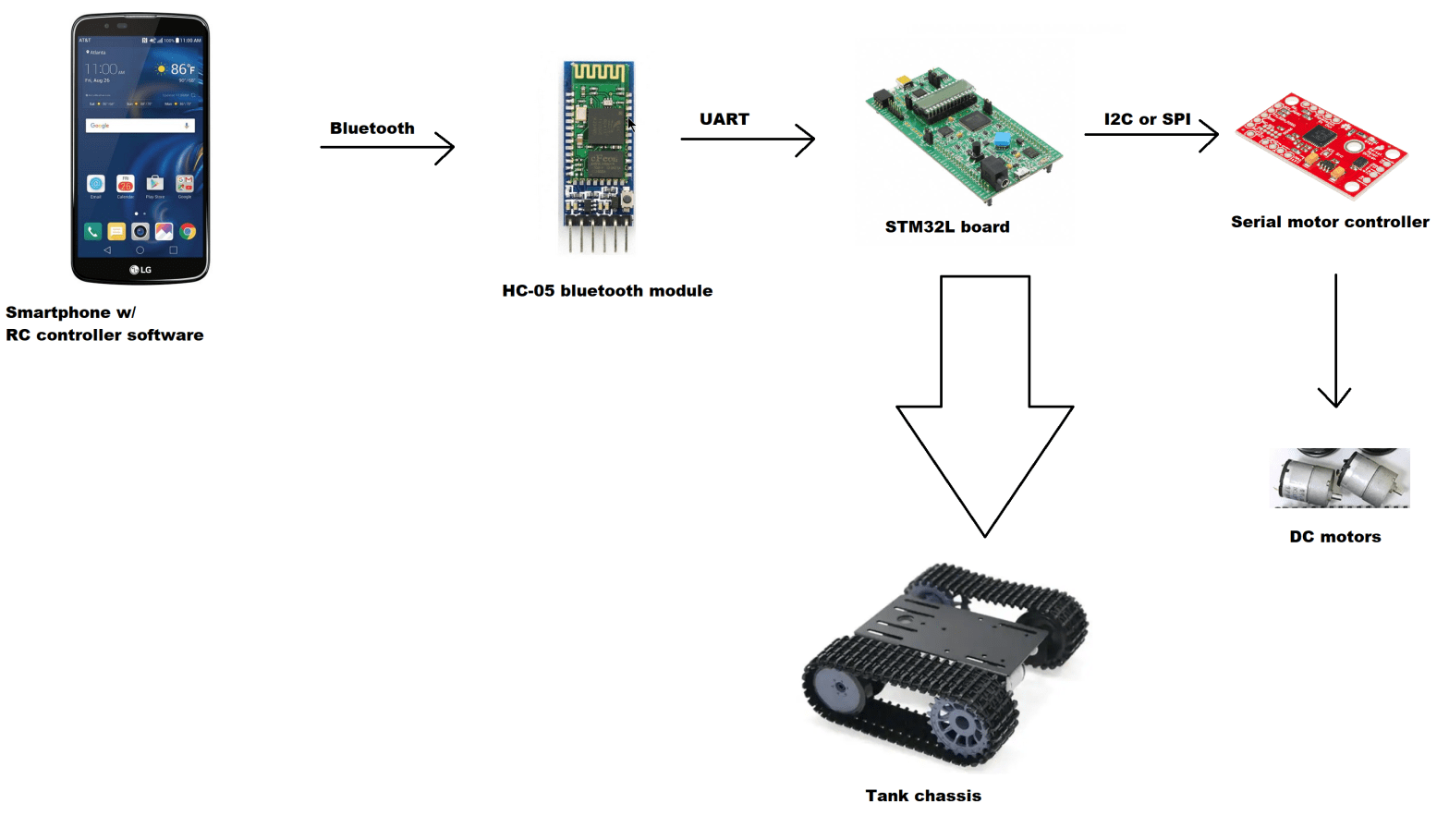
The cheapest chassis kit we were able to find so far that seems to fit our requirements is this little tank chassis. It’s simple and seems easily reconfigurable, so this is probably what we’re going to go with. Here’s the plan so far:
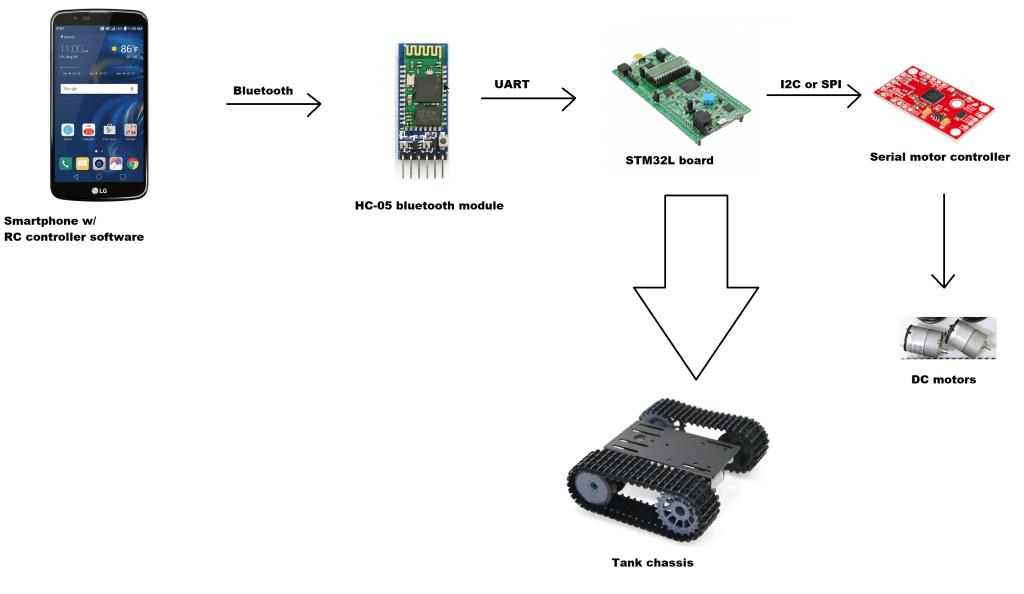
The HC-05 Bluetooth module communicates w/ the STM32L board via UART, so that’s one peripheral and one serial communication protocol. The Sparkfun serial controlled motor driver can be communicated with over I2C, SPI, or UART and controls the DC motors. Both motors spin one way to go forward, and spin the opposite way to go backwards. Turn left by not spinning left motor and spinning right motor forward. Visa-versa to turn right. Maybe for a stretch goal we can put a swinging turret on top that shoots rubber bands 😛
- TP101 tank undercarriage kit
- SparkFun serial controlled motor driver
- HC-05 bluetooth module
- Batteries TBD
