Tuesday and today have been productive. In lab on Tuesday we assembled the tank chassis. It was a little bit tricky because of poorly-written instructions, but we were almost able to finish.
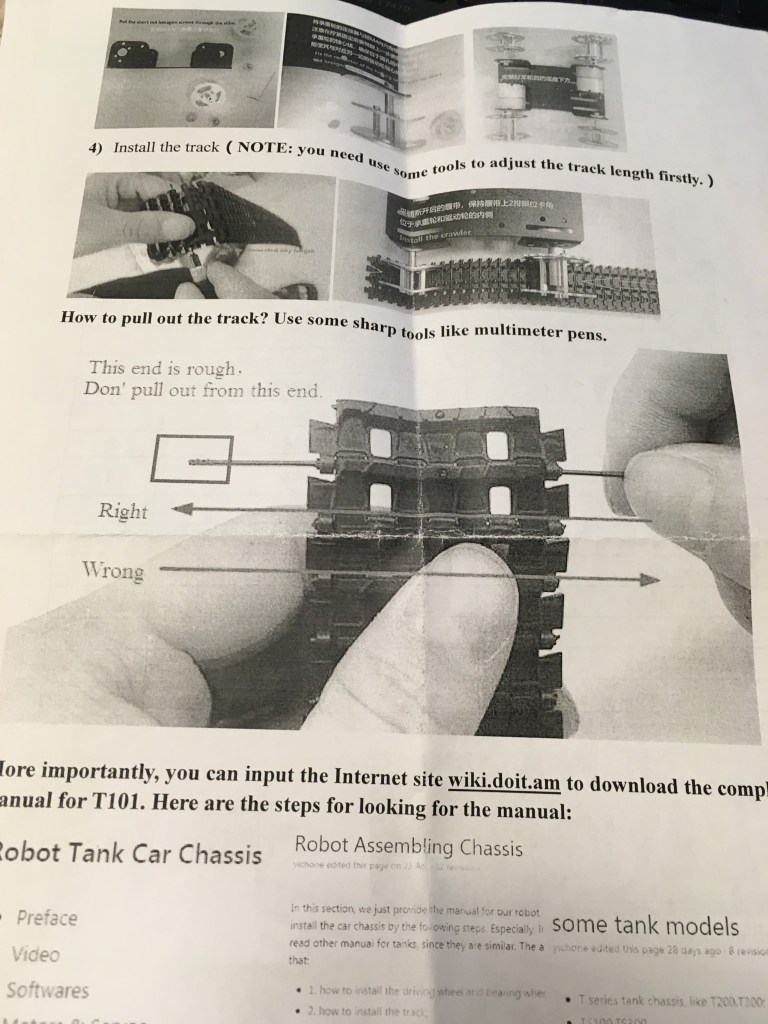
At around 10PM we had to take links off of the tread so that it would fit over the wheels. We weren’t able to figure it out so we put it off till later. Today I brought a old compass with a sturdy needle with which we were able to get the tread installed properly.
We spent most of today repurposing the code from lab 3A so that a phone could send signals to the car via Bluetooth. Controls from the phone would be sent as a byte which we can interpret as a single character.
We realized that the code we were repurposing wasn’t actually using the interrupt handling function that was in it. That thing was just there as a model. The path forward became clearer to us:
- write code so a received byte over Bluetooth triggers an USART interrupt
- have the USART interrupt trigger a signal via I2C or SPI (whichever we decide on) which would tell the motor controller to take the appropriate action (move forward, left, etc.) based on the value of the received byte
